Generative AI with JAX
2025-10-01



What does “generate” mean?

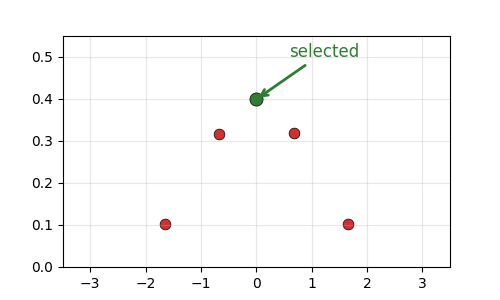
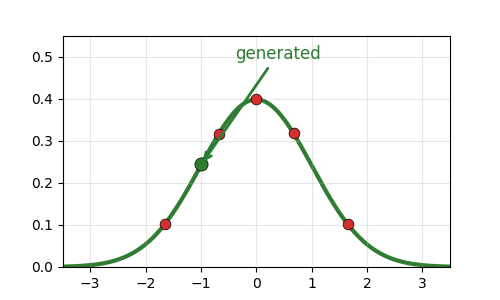
Key Idea: Generative AI
- Generative AI is about learning the underlying distribution \(p(\text{data})\) and sampling from it to generate images.
- The output of a generative model is a new data point.
- Generative is intrinsically related to probability distributions.
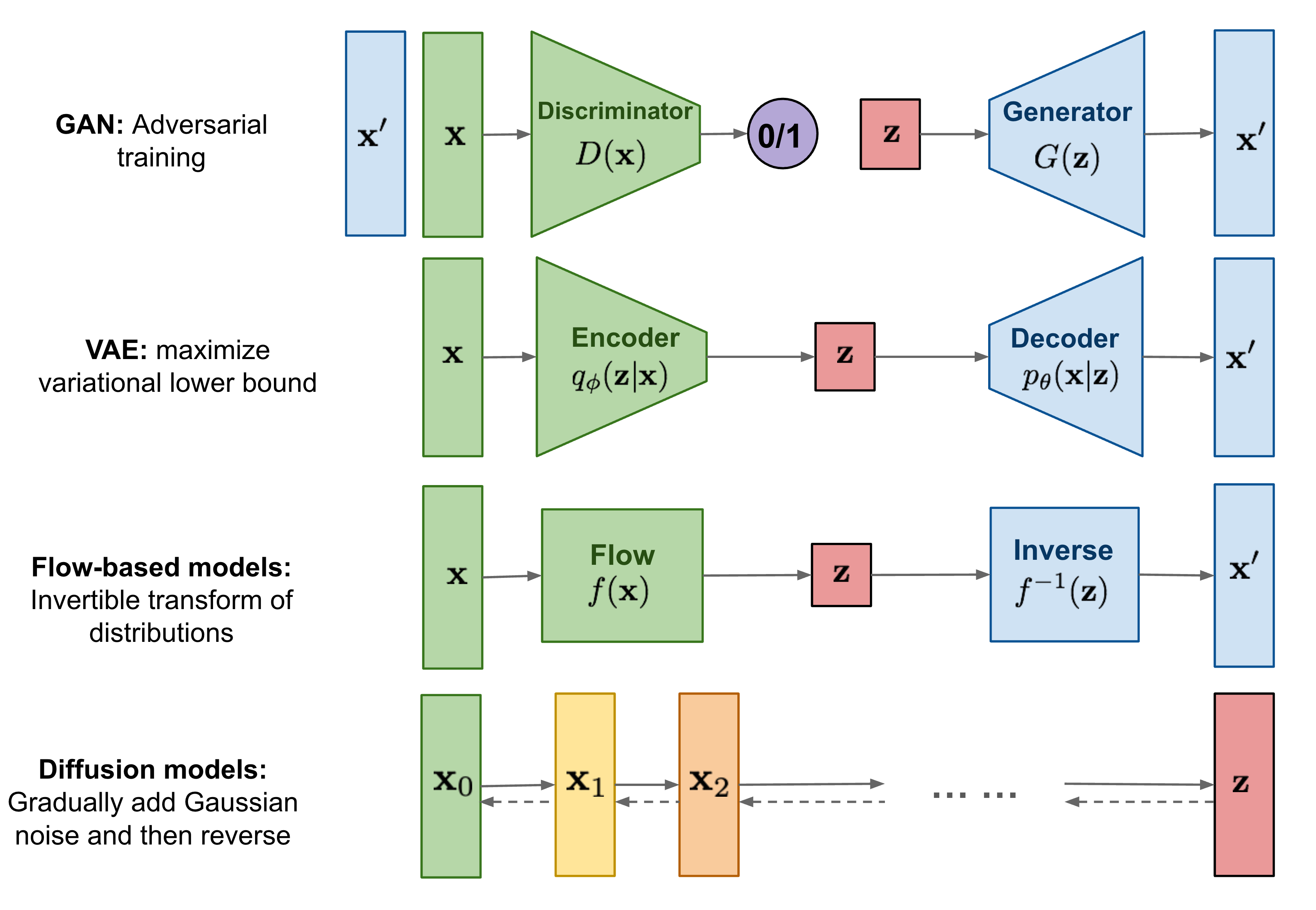
Generative Adversarial Networks (GANs)
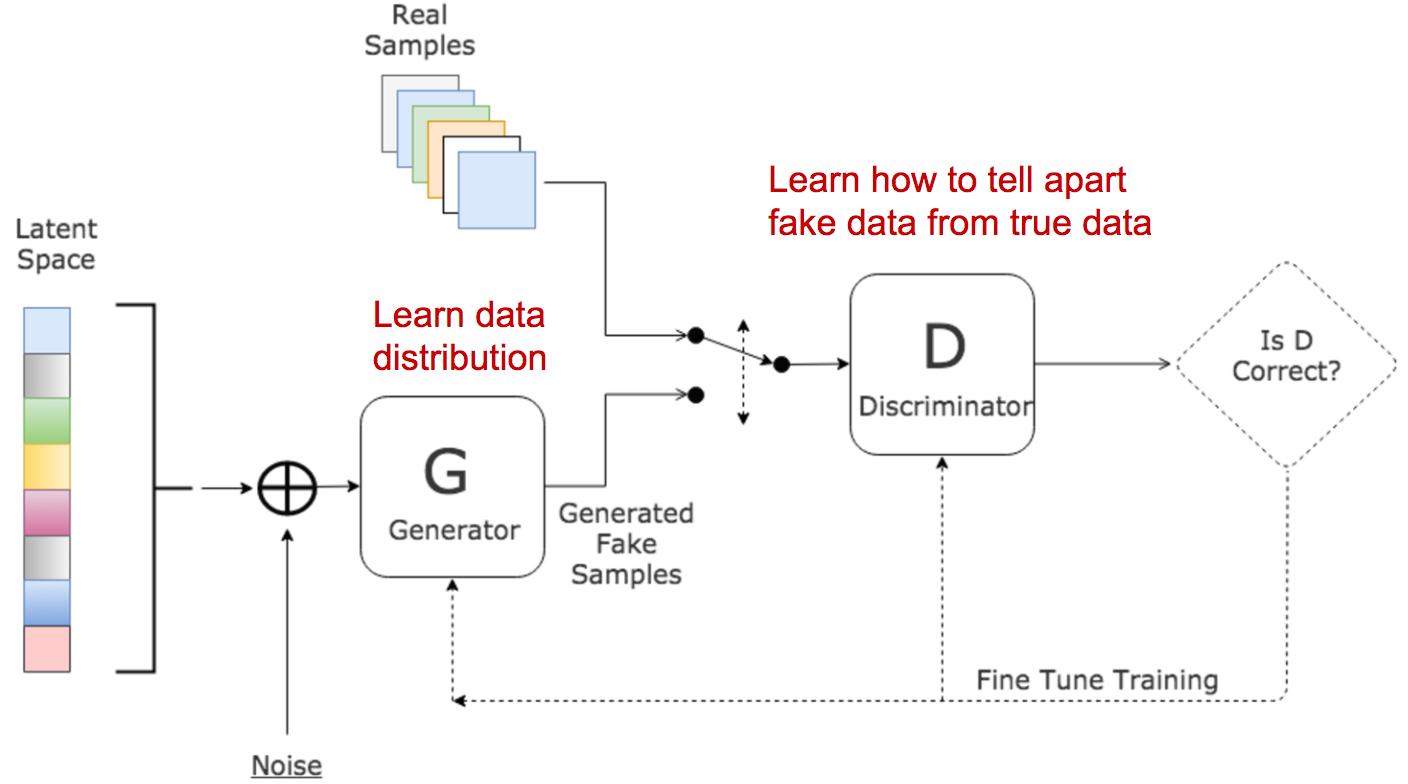
\[\min_G \max_D \mathbb{E}_{x\sim p_\text{data}}[\log D(x)] + \mathbb{E}_{z\sim p(z)}[\log(1 - D(G(z)))]\]
- Loss function
- Generator: produces samples G(z) to fool D
- Discriminator: estimates real vs fake probability D(·)
Advantages and Limitations
- Advantages: sharp samples; flexible implicit modeling; no explicit likelihood.
- Limitations: unstable training; mode collapse; sensitive to architecture and tricks.
Limitations with GANs
Unstable learning
Mode collapse
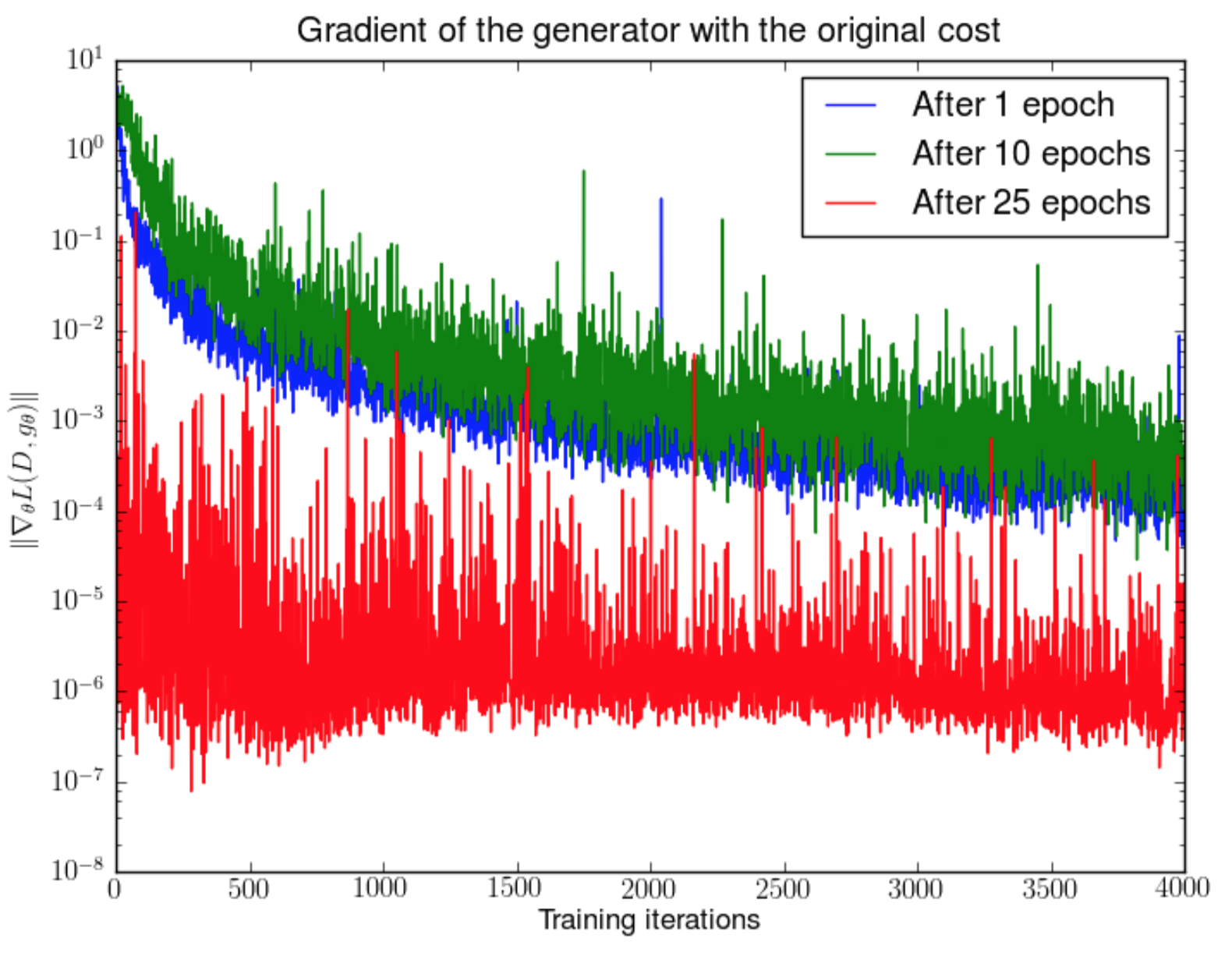
Vanishing gradients
Some possible solutions
- Use WGAN for more stable training and stronger gradients.
- Add gradient penalty (WGAN-GP) to keep the critic smooth.
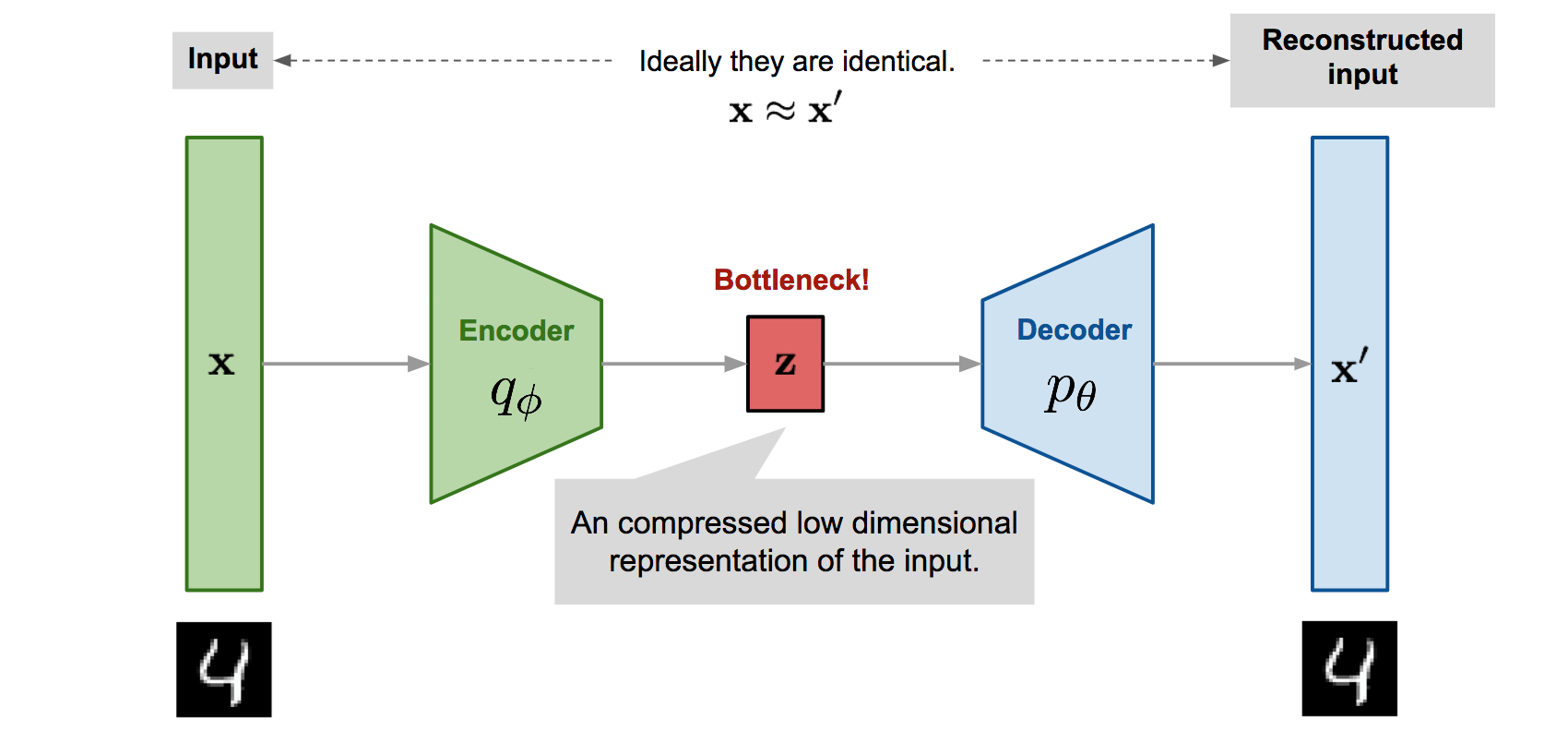
Variational Autoencoders (VAEs)
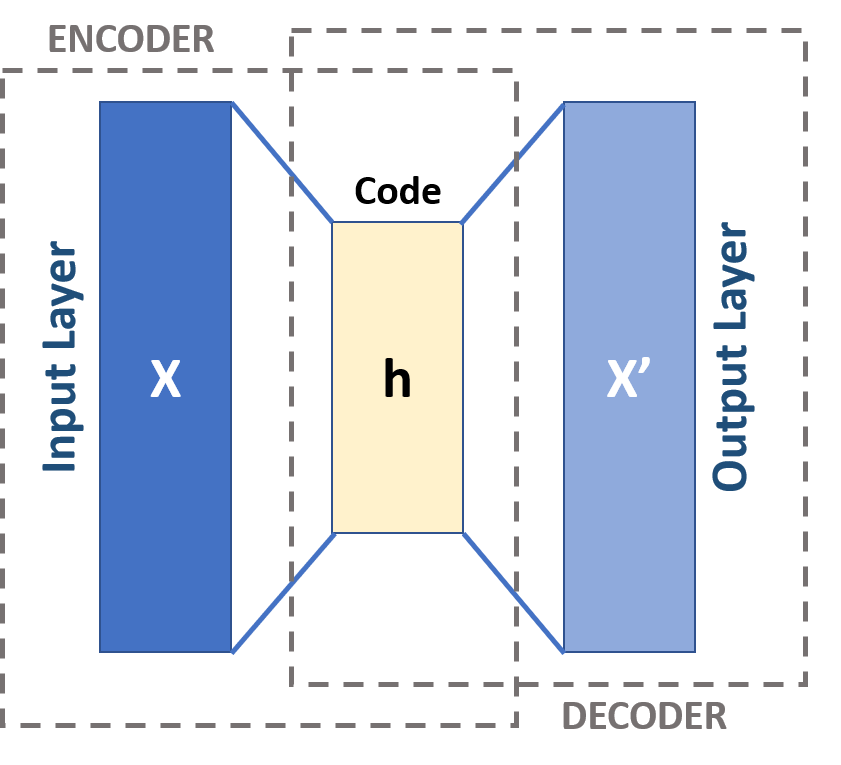
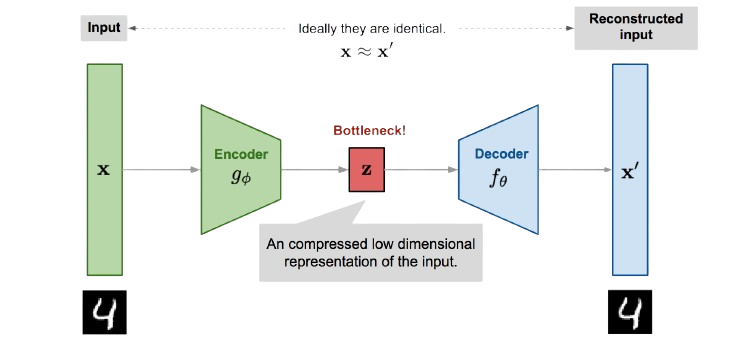
VAE takeaways
- VAE learn optimal compression into the latent space
- Represents a dataset by an easy to sample gaussian distribution
- Compared to GAN gives a better access to probability distribution
- Produces blurrier images than GANs
Evidence Lower Bound (ELBO):
\[\mathcal{L} = \mathbb{E}_{q_\phi(z|x)}[\log p_\theta(x|z)] - \text{KL}(q_\phi(z|x)\|p(z))\]
- Reconstruction: decoder quality
- KL Divergence: latent regularization
Reparameterization trick: \[z = \mu + \sigma \odot \epsilon, \quad \epsilon \sim \mathcal{N}(0,I)\]
VAE — Why KL matters (β-VAE)
Without KL regularization:
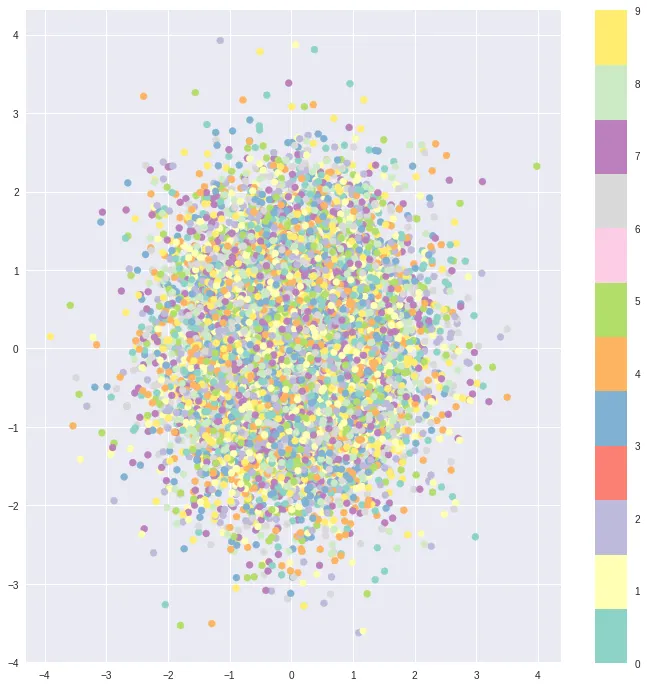
Latent space is unstructured
With KL regularization:
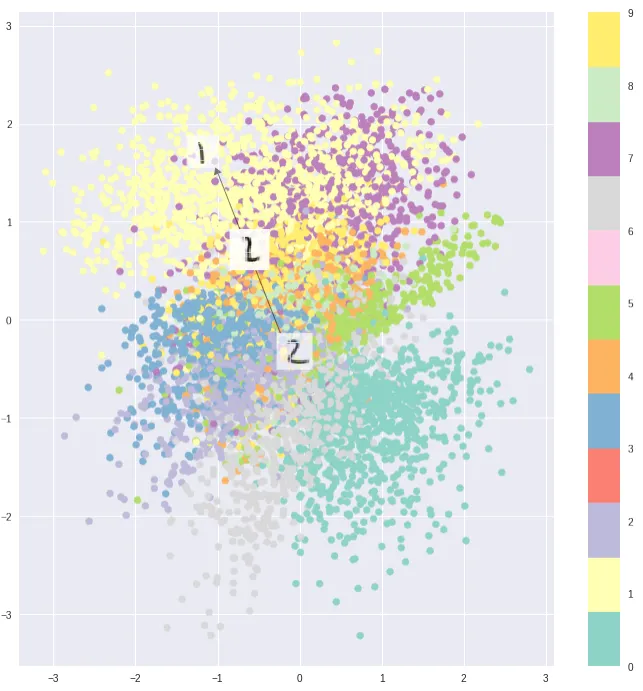
Organized, continuous latent space
β-VAE objective:
\[\mathcal{L}_\beta = \mathbb{E}[\log p_\theta(x|z)] - \beta \cdot \text{KL}(q_\phi(z|x)\|p(z))\]
- \(\beta > 1\): More disentanglement, less reconstruction
- \(\beta < 1\): Better reconstruction, less structure
- Limitation: Gaussian prior can bias toward simpler shapes
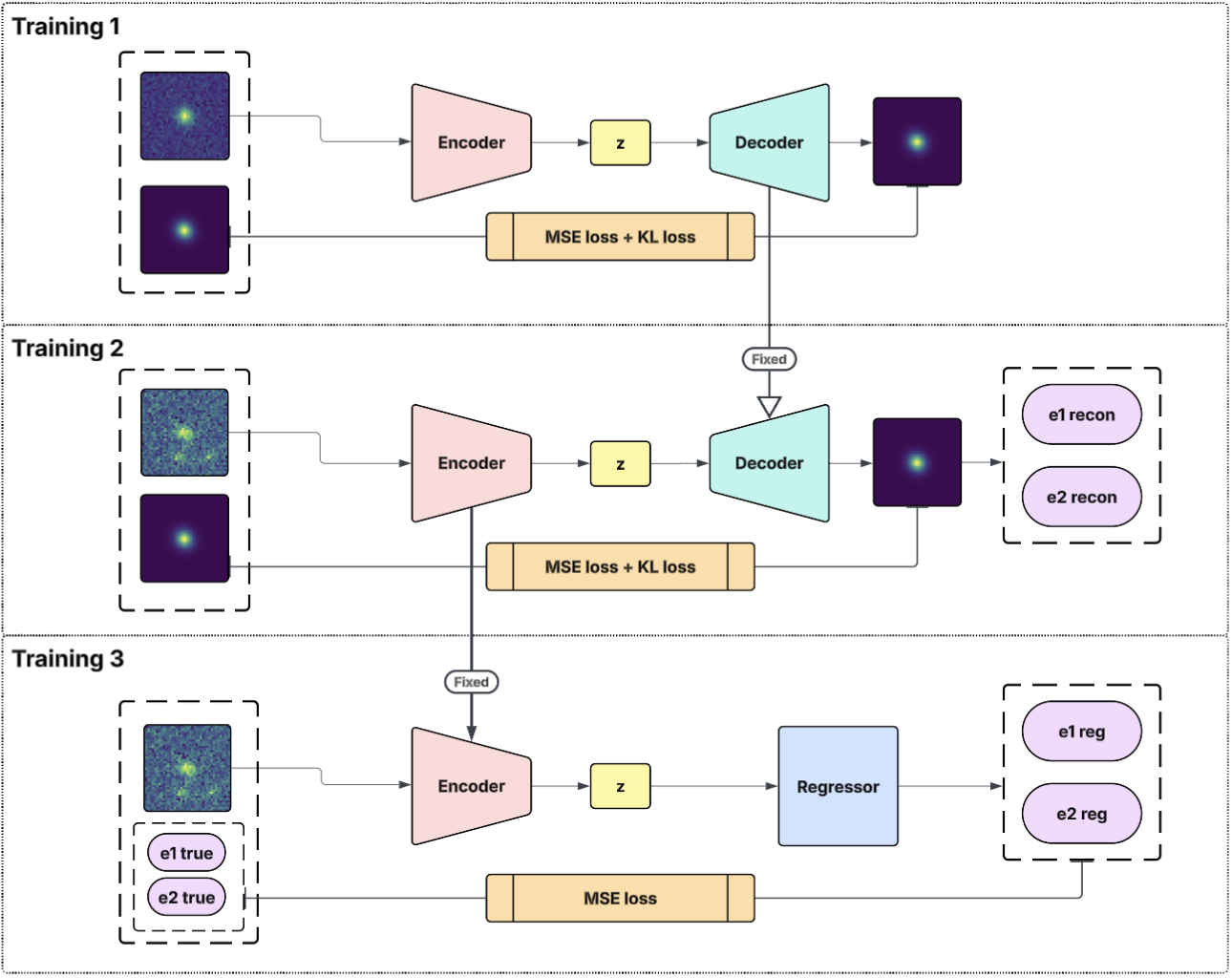
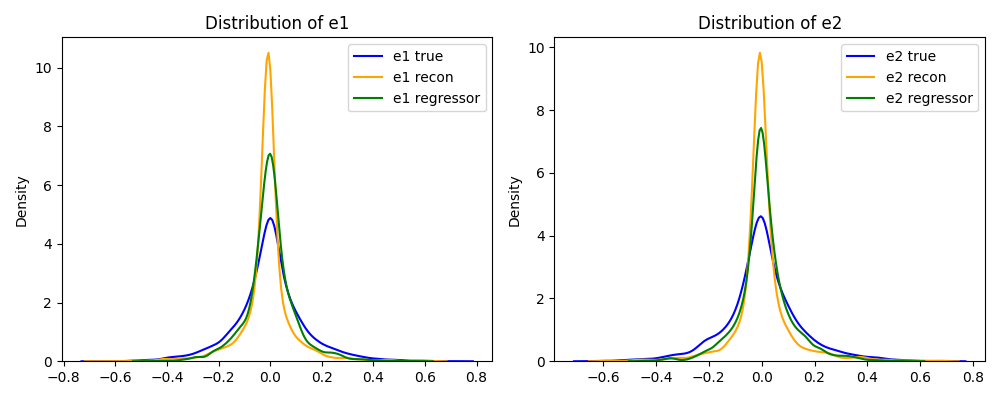
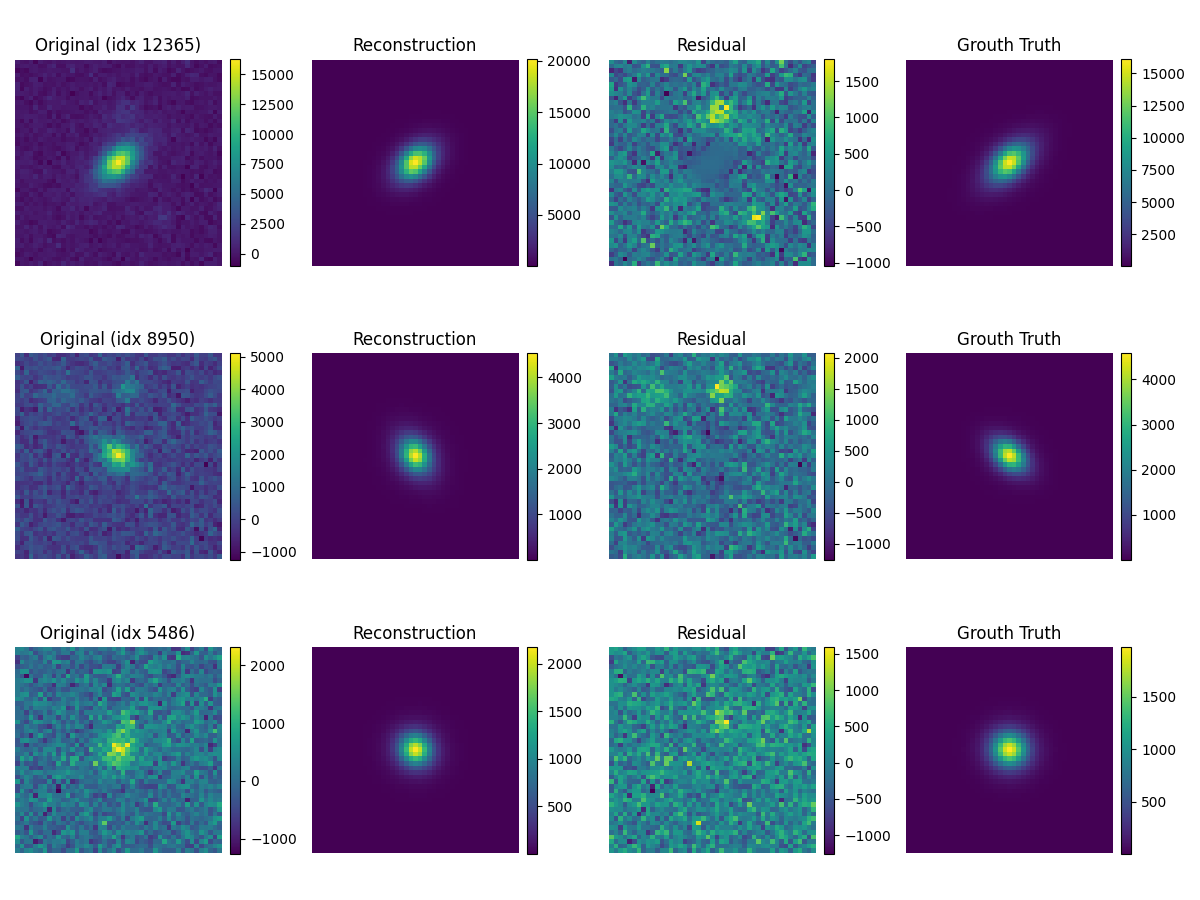
VAE in Cosmology (Deblending)

Normalizing Flows (Flow-based Generative Models)
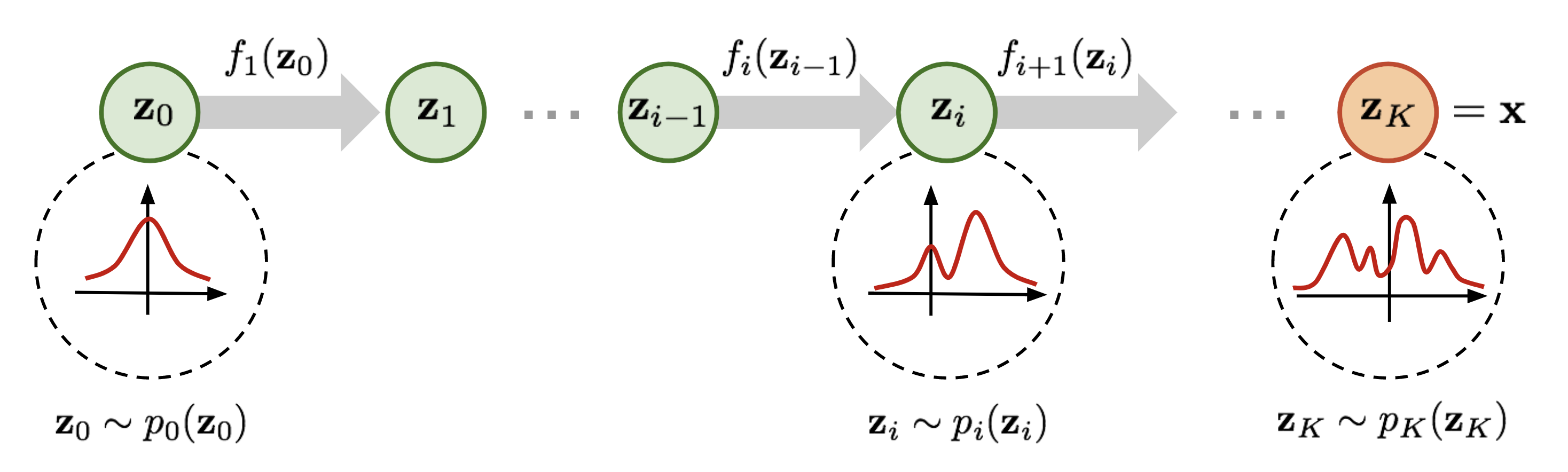
Mappings: \(f(x) \to y\), \(g(y) = z\); \(z = g_{\theta}(x) = g_K \circ \cdots \circ g_1(x)\)
Log-likelihood
\[\log p_{\theta}(x) = \log p_Z\big(g_{\theta}(x)\big) + \sum_{k=1}^{K} \log \left|\det J_{g_k}\right|\]
Rezende & Mohamed (2015)
In short
- Gaussianize data: \(z = g_{\theta}(x) \approx \mathcal{N}(0, I)\).
- Exact likelihood: \(\log p_{\theta}(x) = \log p_Z(z) + \sum_k \log|\det J_{g_k}|\).
- Generate via inverse: \(x = f_{\theta}(z)\), \(z \sim p_Z\).
Coupling Layers : Forward vs Inverse

Coupling layer computation graph
Forward (x → y)
- Split \(x=(x_a, x_b)\) by mask.
- Conditioning network on kept half: \((s, t) = \text{NN}(x_a)\).
- Affine update (element-wise):
\[ y_a = x_a, \qquad y_b = x_b \odot e^{s(x_a)} + t(x_a). \]
Inverse (y → x)
Given \((y_a, y_b)\):
- Recompute \((s, t) = \text{NN}(y_a)\).
- Invert the affine on the transformed half:
\[ x_a = y_a, \qquad x_b = \big(y_b - t(y_a)\big) \odot e^{-s(y_a)}. \]
Masked Autoregressive Flow (MAF) vs Inverse Autoregressive Flow (IAF)
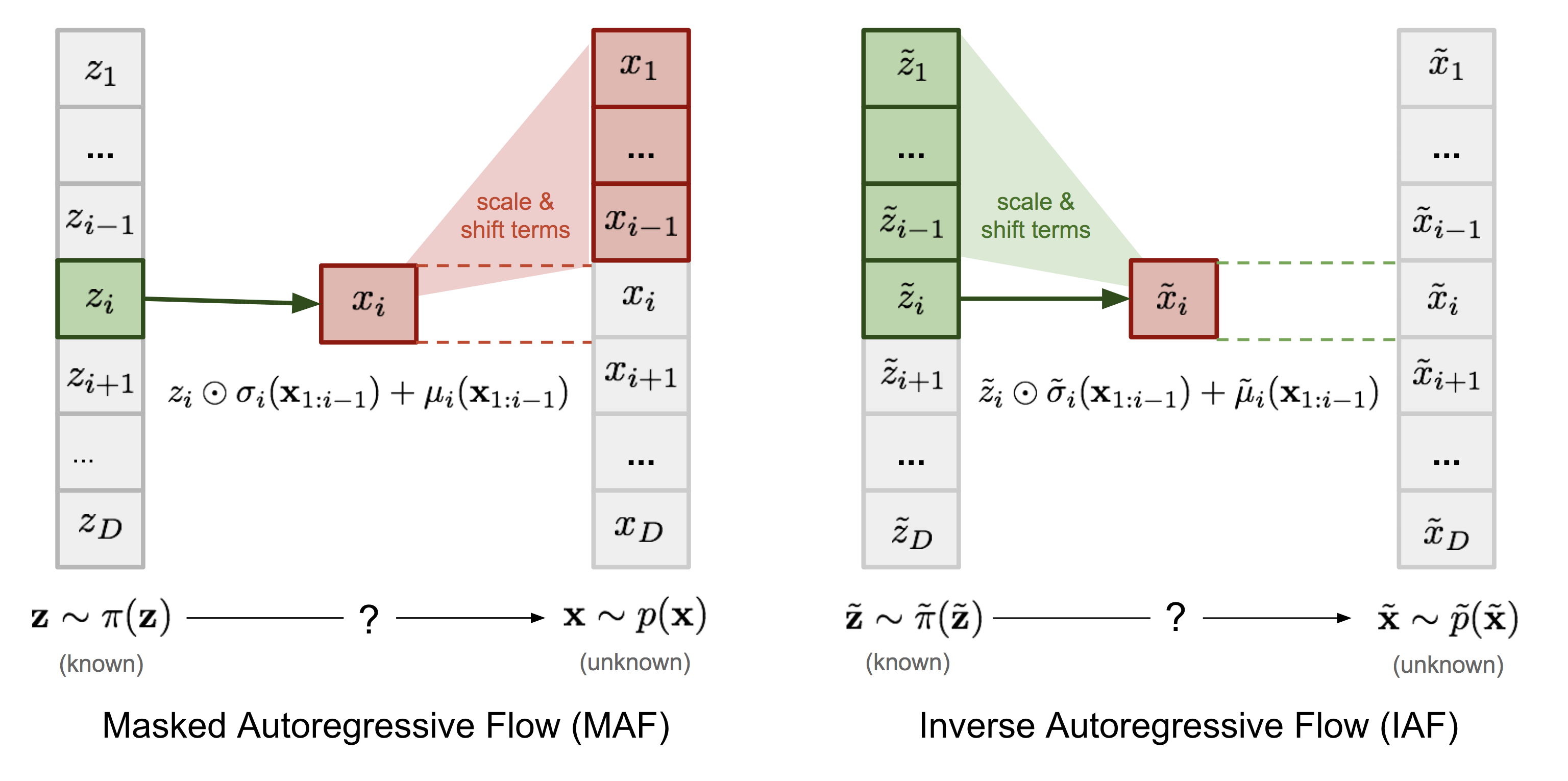
MAF vs IAF comparison
MAF (Masked Autoregressive Flow)
Autoregressive flow where density evaluation is parallel sampling is sequential.
\[ z_i=\frac{x_i-\mu_i(x_{<i})}{\sigma_i(x_{<i})} \]
IAF (Inverse Autoregressive Flow) — fast sampling
Same masked structure but reversed so sampling is parallel (given \(z\)), density is sequential.
\[ x_i=\mu_i(z_{<i})+\sigma_i(z_{<i})\cdot z_i \]
Diffusion Models
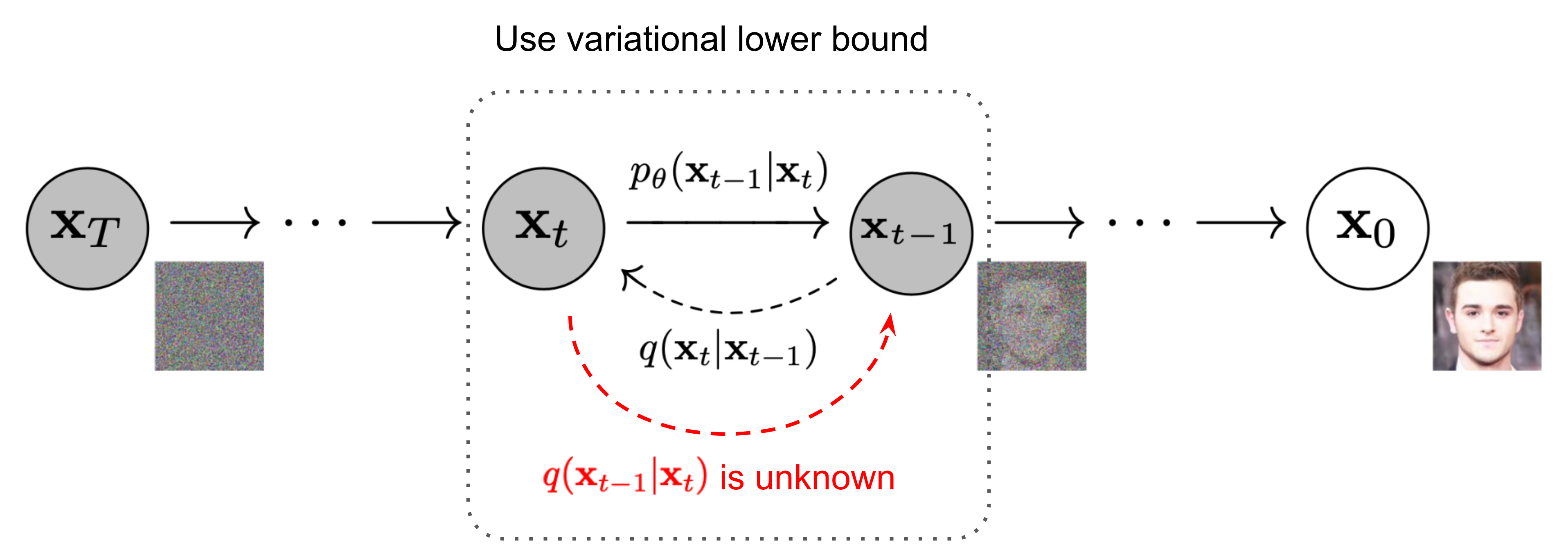
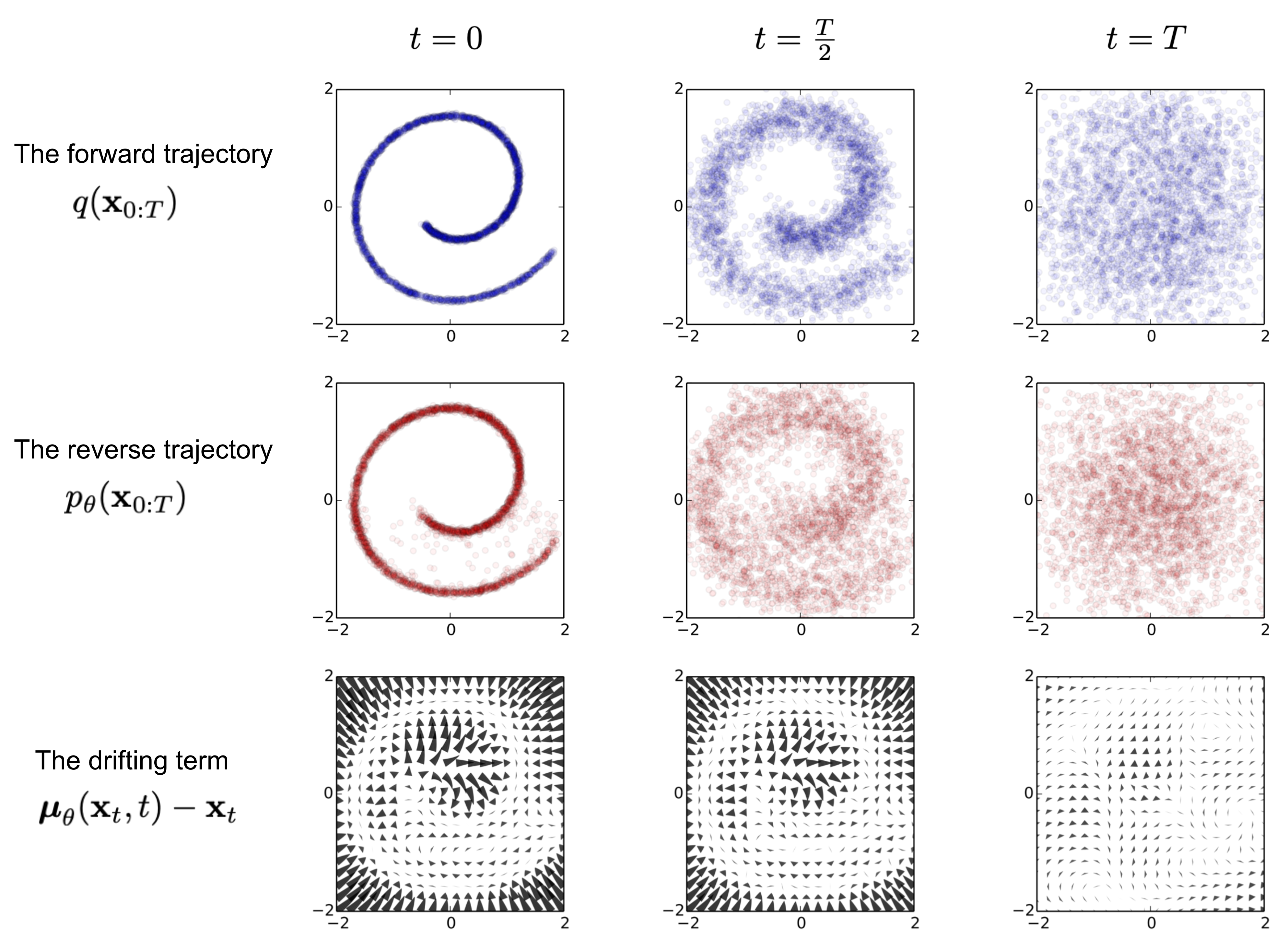
Characteristics of Diffusion Models
Pros:
- Best quality & coverage: diffusion / flow-matching models for images; rapidly improving for video.
Cons:
- High computational cost for training and sampling.
Generative models overview
What is JAX?
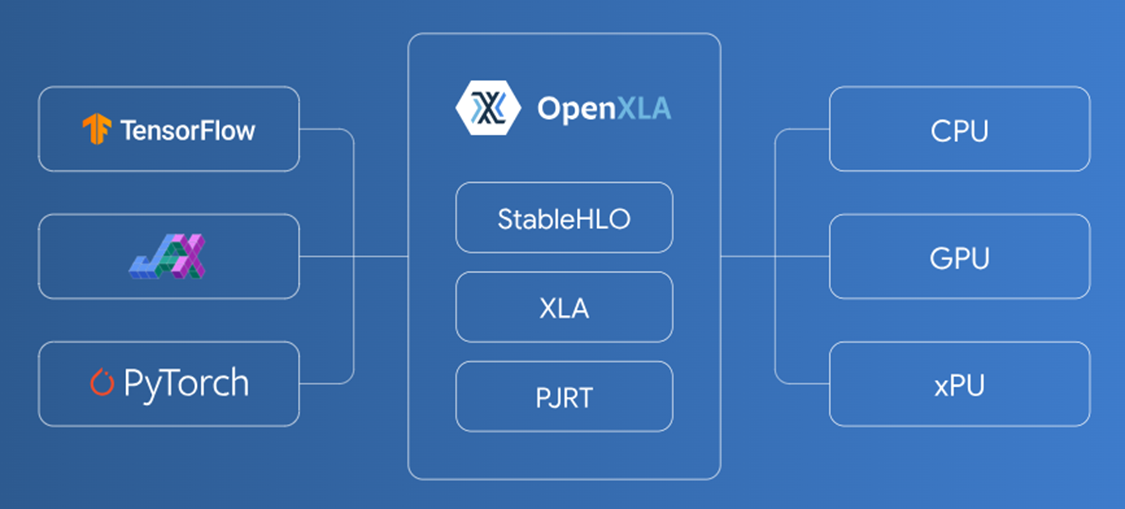
<h2 style="margin:0;">JAX and OpenXLA</h2>JAX Ecosystem: an overview
FLAX ![Flax]()
Neural network library for JAX with modules, layers, optimizers, training loops.
Optax ![Optax]()
Gradient processing and optimization library for JAX.
BlackJAX ![BlackJAX]()

MCMC sampling library for JAX with HMC, NUTS, SGLD algorithms.
NumPyro ![NumPyro]()

Probabilistic programming library for JAX with Bayesian modeling and inference.
Diffrax
Differential equation solver library for JAX with ODE, SDE, DDE solvers.
Composability + Trade-offs
Strengths
- NumPy-like API; clean function transforms
- Fast & differentiable via XLA +
jit - Powerful composition:
jit(vmap(grad(...))),shard_mapfor multi-device - Ecosystem: Flax, Optax, BlackJAX, Distrax, Diffrax
Weaknesses
- Steep learning curve (purity, PRNG keys, transformations)
- Fewer off-the-shelf models vs PyTorch
- Some APIs evolving (e.g., sharding tools) → more boilerplate at first

Example A: Variational Autoencoder for galaxies
Variational Autoencoder
Train a VAE on GZ10 galaxies and analyze latent space
Notebook link : Generative_AI_JAX_GZ10_VAE.ipynb
Example B : Using a classifier from the latent space
VAE latent space to redshift
Classify galaxy morphology from VAE latent space
Notebook link : Generative_AI_JAX_GZ10_VAE_Classifier.ipynb